Tariq Yousuf and Mark Geha
Final Project Presentation Slides
Table of Contents
- Introduction
- Prior Works and Experimental Setup
- Pre-Improved Implementation
- Haar Wavelet Transform
- Dynamic Time Warping
- RBF Kernel SVM
- Experimental Results
- Improvements to RBF Kernel SVM
- Gaussian Noise
- SMOTE
- Improved Experimental Results
- Neural Network Comparison
- Timeline
- References
Introduction
Gesture Recognition is an emerging field with a breadth of use ranging from improved human-computer interactions, medical care, and numerous more scientific and simply enjoyable applications.
In this project, we are analyzing Dynamic Time Warping and RBF Kernel SVM in hopes of understanding the best approach for ultra-low power microcontrollers and accelerometers.
Both of these algorithms are open-source, efficient, low-complexity, and prevalent in gesture recognition applications.
We will test each of these approaches using the common gestures tested between each research paper in order to accurately represent its effectiveness.
The most ideal method of testing will come down to the accuracy of the detection and inclusion of noise and approximations.
Furthermore, we will evaluate relevant considerations in gesture control such as user and time dependency, robustness in recognizing gestures with slight difference from training samples, and associated complexity with each approach. All these evaluations will occur on an Arduino Nano BLE Sense 33 and will all utilize real-time accelerometer and gyroscopic data and classification results. This will allow us to accurately create patterns and compare the detection algorithms.
Once that analysis is complete, we will experiment with methods of improving our classification under these constraints by adding Gaussian Noise and utilizing SMOTE to better balance our training data. Finally, we will compare the accuracy of our methods to that of a Neural Network classifier in order to best understand the trade-offs made between the different classifiers.
Prior Works and Experimental Setup
The first approach we will examine is based on research paper (1) which utilizes Dynamic Time Warping (DTW) in order to classify hand gestures. These hand gestures are designed to be mutually exclusive from each other and only rely on full hand/arm motion (rather than finger motion). The reserach paper suggests a very simplified version of DTW with relatively high complexity, thus we will improve upon their approach to run efficiently on the Arduiono. For our purposes, the Nano BLE Sense will be mounted on the hand of the user during testing. To ensure that the margin of error is minimized during initial testing, there will be a secure strap to hold the Arduino such that its detected motions are almost identical to that of the hand.
The second approach is based on research paper (4) instead relies on a Gaussian Kernel Support Vector Machine classification in order to recognize hand gestures. Furthermore, this approach uses a Haar Wavelet transform in order to reduce features, noise, user dependence, and classification sensitivity. Note that this approach presented in research paper (4) is designed for use on the same gesture library as research paper (1), thus we will use the same testing apparatus and hand gestures. This will ensure that our comparisons are not only accurate, but also emphasize the differences in the algorithms by maintaining a controlled variable, the motions. More details about both of these approaches can be found in the Implementation section of this report.
Both of these approaches represent common techniques for simple gesture recognition; a more demanding recognition task may require more complicated approaches such as Convolutional Neural Networks and Hidden Markov Models. However, through this analysis, we instead hope to be able to make an accurate, educated recommendation for simple gesture recognition tasks that don’t necessarily require significantly computational classification techniques.
Finally, we will make continuous improvements on all of the aformentioned methods in order to improve classification for a wide variety of users in different enviornments. Through this report, we hope to develop the most effective gesture recogniton classifier for this specific task, and then finally compare it to a Neural Network classifier.
Pre-Improved Implementation
We will now introduce Haar Wavelet Transform, Dynamic Time Warping, and RBF Kernel SVM and discuss how these algorithms were implemeted on Arduiono. Initial improvements made to the algorithms based on the aformentioned research papers are discussed here; further improvements to these methods using training data augmentations will be introduced later in the report once these methods have been thuroughly analyzed. Through this distiction, we hope to determine if our proposed training data augmentation techniques are effective, and if they should be employed for related gesture recognition tasks.
Haar Wavelet Transform
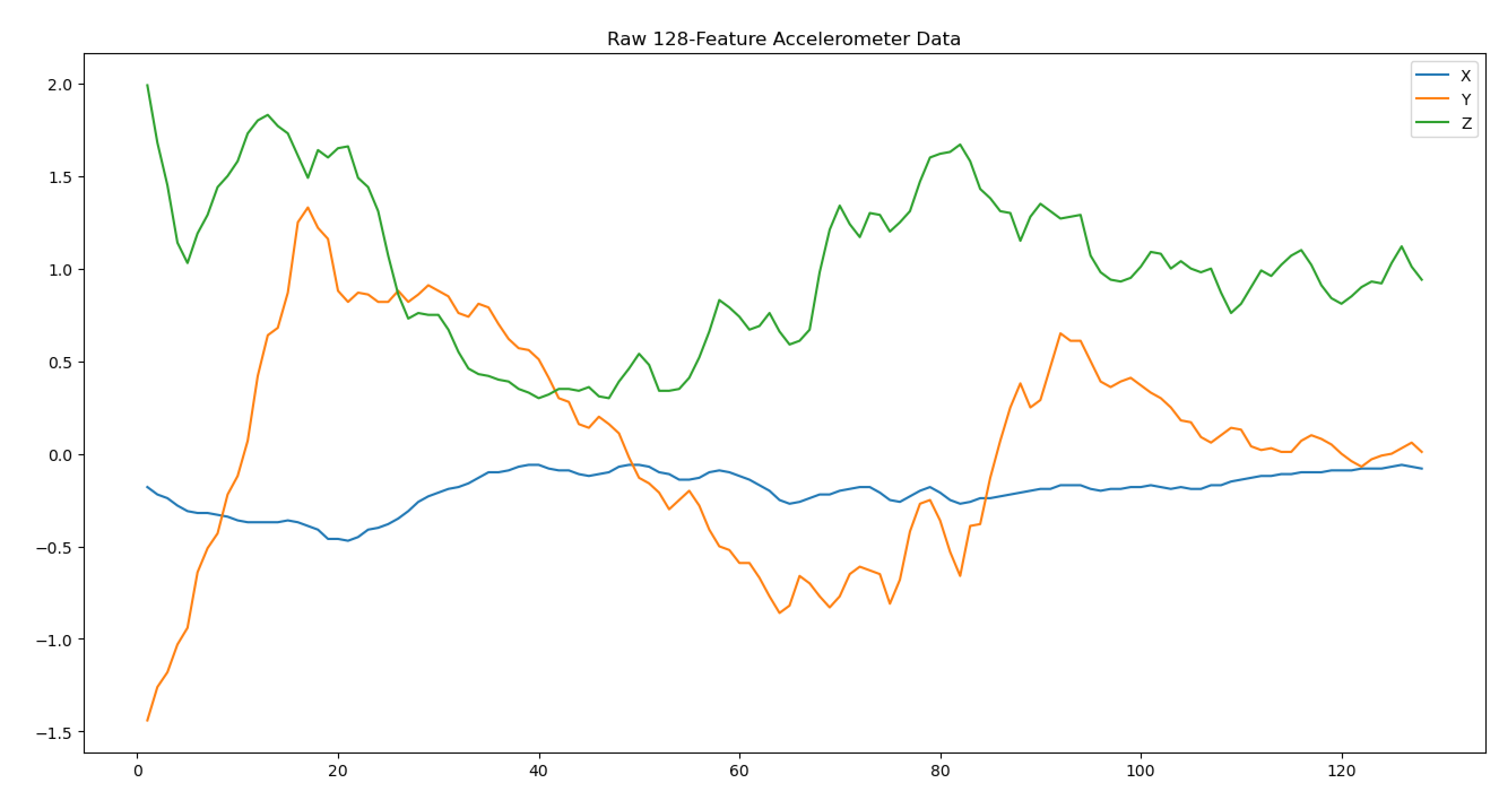
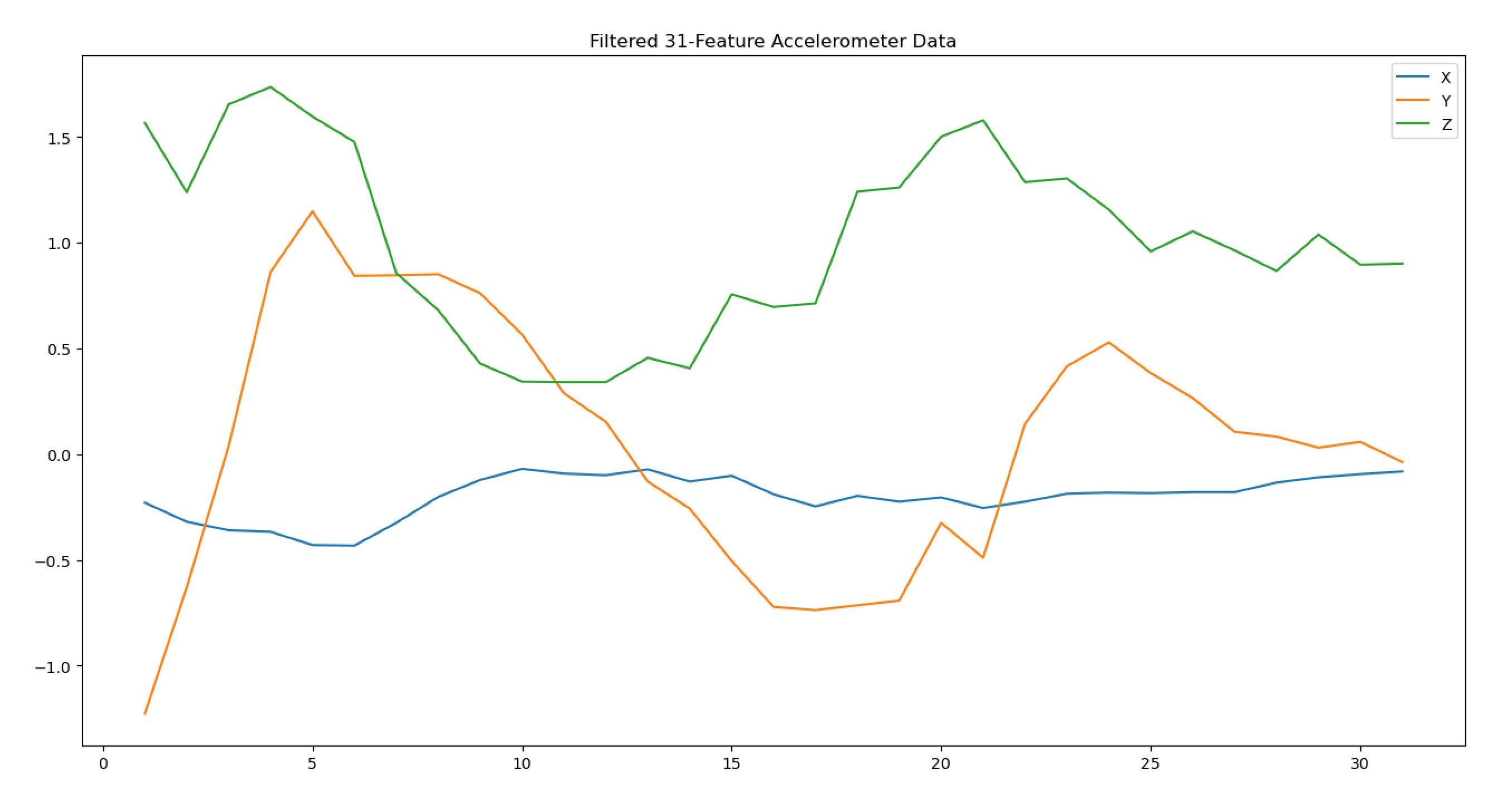
The Haar Wavelet transform was proposed in research paper (4) as a method of reducing features, noise, and other small-signal pertubations that could lead to misclassification. For our uses, we utilized the Haar Wavelet tranform as an averaging function, which could decopose a N-feature signal to N/2 -1 feature signal using the below formula:
where x is the original signal, s is the reduced-feature signal, and k is from 0 to N/2 - 1. By recursively using this transform, a signal can be further decomposed to a smaller feature space.
For our project, we reduced our 128-feature accelerometer data (for each axis) from the Arduiono, and reduced it to a 31-feature signal. As shown below, this tranform significantly reduces the noise of the signal for each directional component while maintaining the large-signal waveform. Furthermore, any computations on the signals will be significantly faster because the each signal is now 75% smaller.
Dynamic Time Warping
Dynamic Time Warping operates by comparing a sample to various templates and determining which template is closest to the sample. The euclidian distance is used between the sample and each template in order to genearate a cost matrix which is then used to determine the best-fit template. The below figures taken from research paper (1) best summarize this algorithm and provide a graphical interpretation.
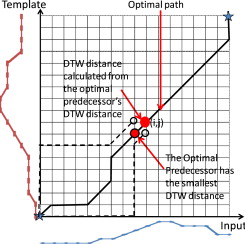
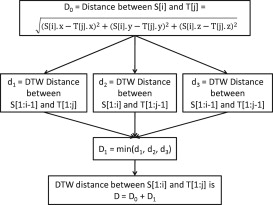
By looping through the entire time range of the sample and the templates, this algorithm makes an effort to reduce time-dependencies. However, we will later see that this naive template matching approach results in inaccurate classification when non-ideal samples that differ from the templates are used.
Furthermore, note that this algorithm is of the order since sample must warp through each m template, given that they both have n features.
In order to significantly reduce the complexity of Dynamic Time Warping, we employed the Haar Wavelet tranform to reduce the features for each dimension from 128 to 31. Research paper (1) offered no such feature reduction techniques, and instead did all the classification on a PC rather than through a microcontroller.
This optimizaiton allowed us to efficiently run DTW on the Arduino with accuracy expected of this classifier.
However, even with this feature-reduction improvement, we were only able to include very limited templates due to the complexity associated with adding templates. In this situation, research paper (1) proposed testing several templates for each shape and then determining which templates had the best test accuracy. Using this method, we were able to find the best templates for each shape, and thus maintain a low-complexity implementation of DTW without a significant sacrifice to accuracy.
RBF Kernel SVM
RBF Kernel SVM instead operates by using a non-linear boundary and Support Vectors to accurately and efficiently classify the samples in linear time. Based on resarch paper (4), the SVM classifier opearates on 31-feature Haar transformed data rather than the raw 128-feature component-wise accelerometer data. As explained below, this classifier offered a easily-deployable, efficient, and accurate alternative to Dynamic Time Warping
We trained our SVM classifier in Python using the sklearn package. Using a grid search and research paper (1), we found best test accuracy with a gamma of 0.01 and a C of 1. Once the model had been trained, we used the micromlgen library to convert our classifier to C. This package offered a straightforward method of converting our classifier from Python to C, which then could easily be implemented onto the Arduino.
This classifier allowed us to use a significatly larger dataset for training (50 examples per shape) without any impact on computational complexity since only the support vectors and the kernel computation are used. Furthermore, RBF Kernel SVM is able to classify shapes on the Arduino in linear time, thus significantly reducing the prediction latency compared to that of Dynamic Time Warping. Due to these factors, we were able to dedicate our efforts towards improving our training dataset without any computational complexity trade-offs.
Experimental Results
NOTE: The following results were made by a single person based on the training data of the other groupmate. Due to COVID-19 times, we have limited resources and the data is only predictive of its responses to two separate individuals. We would need more interaction to get a better general data set.
NOTE: These tests were conducted in cycles of 100 to minimize human error. In the case that the user accidentally made an inadvertant or non-classifiable gestures, that sample was ignored as it was not a successful attempt to make a motion. Through this method, we removed unnecessary and uninformative outliers from the model and improved the true accuracy. We should not expect the model to work in the case of a human error and instead simply trying to represent the accuracy of the system itself.
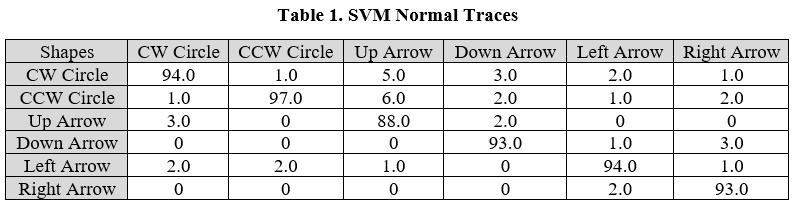
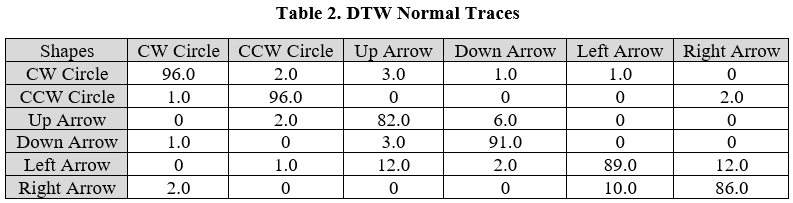
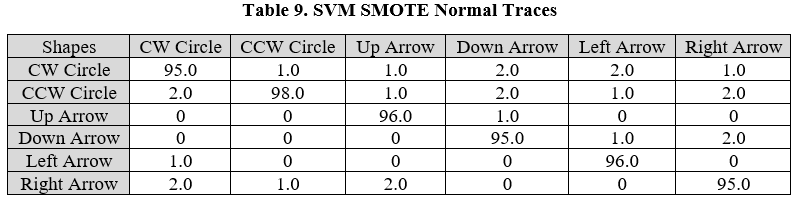
Setting up the system with a normalized environment and as accurate motions as possible, we get the following results that show a successful classification by both the SVM and the DTW techniques. Note that CW refers to clockwise circle, CCW refers to counter-clockwise circle, the colums refer to the tested gesture, and the columns refer to the classifier’s prediction of the gesture. Each value in the table corresponds to the percent occurance of that prediction for the given tested gesture.
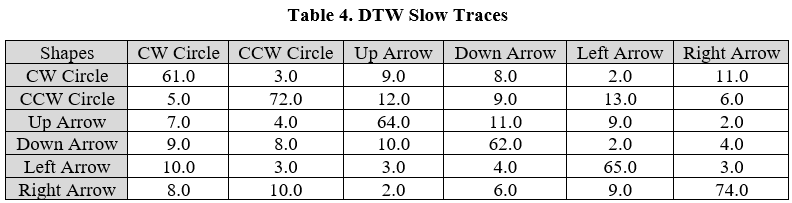
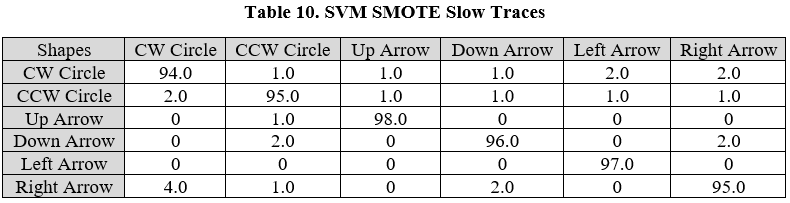
Next, we looked to see how speed of motion would affect the classification as different people may use various speeds to make the same gesture.
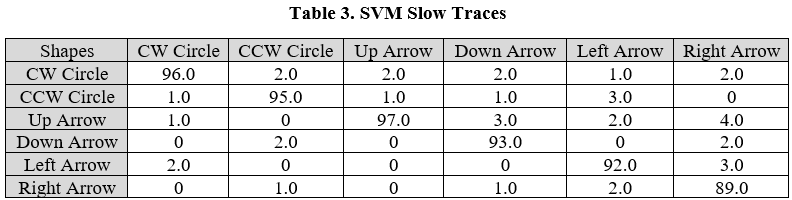
We can see that the SVM is a better classification technique when classifying gestures at slower speeds. Since we were able to generate a large training dataset for the SVM classifier, we were able to include many non-ideal gestures that differed from our original definition of each shape. As a result, SVM excelled in the recognition of slower gestures.
Dynamic Time Warping instead seemed to struggle when the gesture occurs at a different speed than that of the templates. Furthermore, we noticed that a slightly different interpretation of the shape caused significant misclassifications for DTW. For example, many Left Arrow motions would be detected as Right Arrow motions if the Arduino is retured to the center during the sampling window. This was only detected when the speed was slowed down, demonstrating that DTW is highly dependent on the speed of motions and the sampling windows.
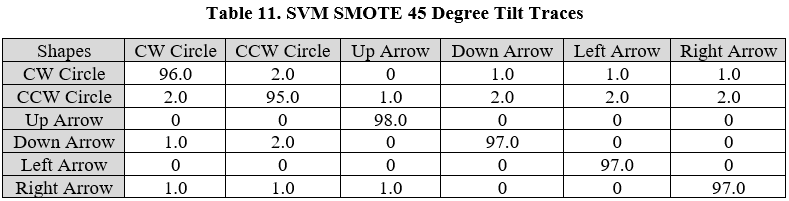
In addition, we looked at implementing our own environmental noise by tilting the Arduino forward at a 45 degree angle. This was encouraged by the concept of video game players leaning forward and not simply holding the controller at a level point, however a similar situation could occur in various gesture recognition tasks. Therefore, angular dependence should be limited in any practical gesture recognition classifier since real-world use of the device would consist of gestures at various angles with respect to our definition of each shape. 45 degrees downward with repect to the ground (or an outstretched arm) was chosen as it seemed to be a reasonable upper limit for every-day use of gesture-recognition devices.
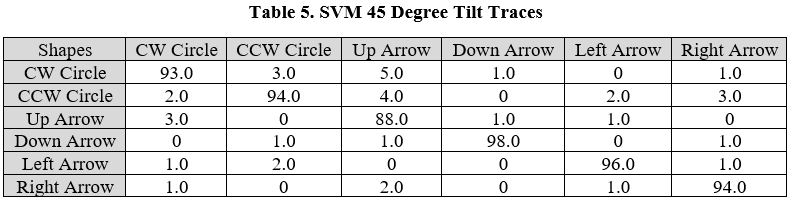
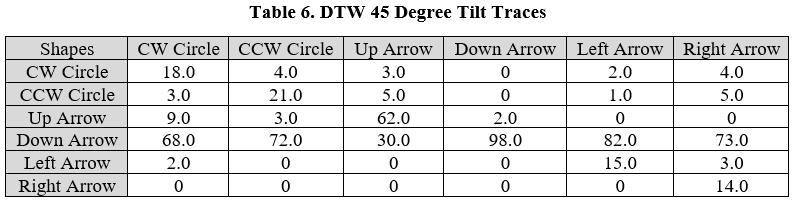
As we can see, the SVM has had very little angular dependence while the DTW was only able to consistently recognize a Down Arrow (and misclassified nearly every other shape as a Down Arrow). This observation again is reasonable as angled gestures would greatly differ from the templates of a DTW classifier, while a SVM classifier could contain these examples in its training data.
Finally, we tried to recreate these shape patterns with a different methodology. In this test, we aimed to see how sensitive the classifier was if we altered the method of each gesture. In our definition of the shapes, circles were formed by starting at the bottom and looping around while arrows were formed by simply flicking the wrist. For the altered gestures, we instead started circles from top-to-bottom and moved the entire arm for arrows (rather than just the wrist). This tests the independence of the models from matching the shape definitions specifically and thus serves as a method of further evaluating user independence.
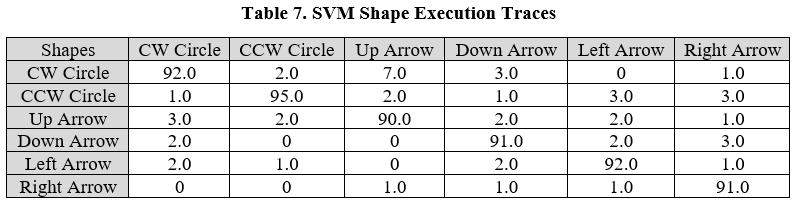
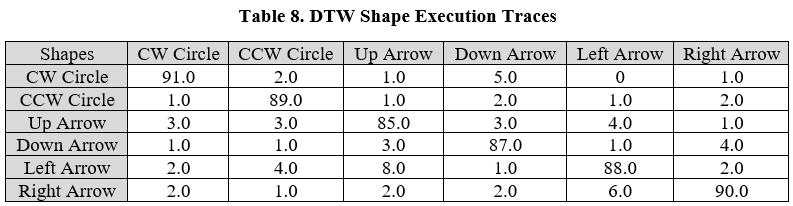
As we can see, DTW continues to struggle with identifying data even slightly different from the templates while the SVM continues to have relatively strong success. As expected, the SVM classifier is highly independent of the definition of the shape and thus can provide successful classification.
Through our adjustment of the hyper-parameters and the generation of a sufficiently large training dataset, we were to create a highly-accurate, robust gesture-recognition classifier through SVM.
Improvements to RBF Kernel SVM
Based on the above results, we can see that the SVM classifier is clearly a better solution when it comes to noisy environments and non-ideal gestures. Since our aim is to provide the best possible solution, we further investigated methods of improving this classifier. Through the above experimental results, we determined that the inclusion of a large, diverse training dataset is necessary for an accurate and robust SVM classifier. Thus, we will now present methods of improving our training dataset we employed in hopes of further optimizing this classifier.
In order to improve our classification, we added Gaussian noise to all of our data in order to represent the environmental noise that a real-world device would observe.
Then, we expanded our training data using the Synthetic Minority Oversampling Technique (SMOTE) in order to boost the non-ideal gestures in our training dataset that appeared to be so critical for the robustness of this classifier.
These processes used to improve our training dataset were presented to us by Professor Srivastava and J.Vikranth Jeyakumar.
Gaussian Noise
The process used for including Gaussian noise in the training data simply consisted of adding a sample of a Gaussian distribution to each component of each training example. The Gaussian distribution had zero mean and a standard deviation that is half of the specific example over the 128-feature space for each component. This standard deviation had to be empirically selected to best improve the training data; too large of a standard deviation could cause misclassification and two small of a standard deviation would be filtered away by the Haar transform.
SMOTE
SMOTE (Synthetic Minority Oversampling Technique) is a data augmentation technique used to boost the number of miniority examples in an imbalanced training dataset. Part of the Sklearn package, this technique is readily available for many applications, and we used it to boost the outliers in our dataset. Note that our training dataset was not imbalanced (we had equal number of examples of each shape), however we choose to use this technique to sythetically add further training data to improve our worst-performing shapes. We used Adaptive Synthetic Sampling (ADASYN), an extension of the SMOTE package, which generates minority examples at locations inversely proportional to the density of that class at that location. ADASYN can be easily visualized in the below figures taken from referece (Note that our training data is much more linearly-separable than the below example):
Before ADASYN:
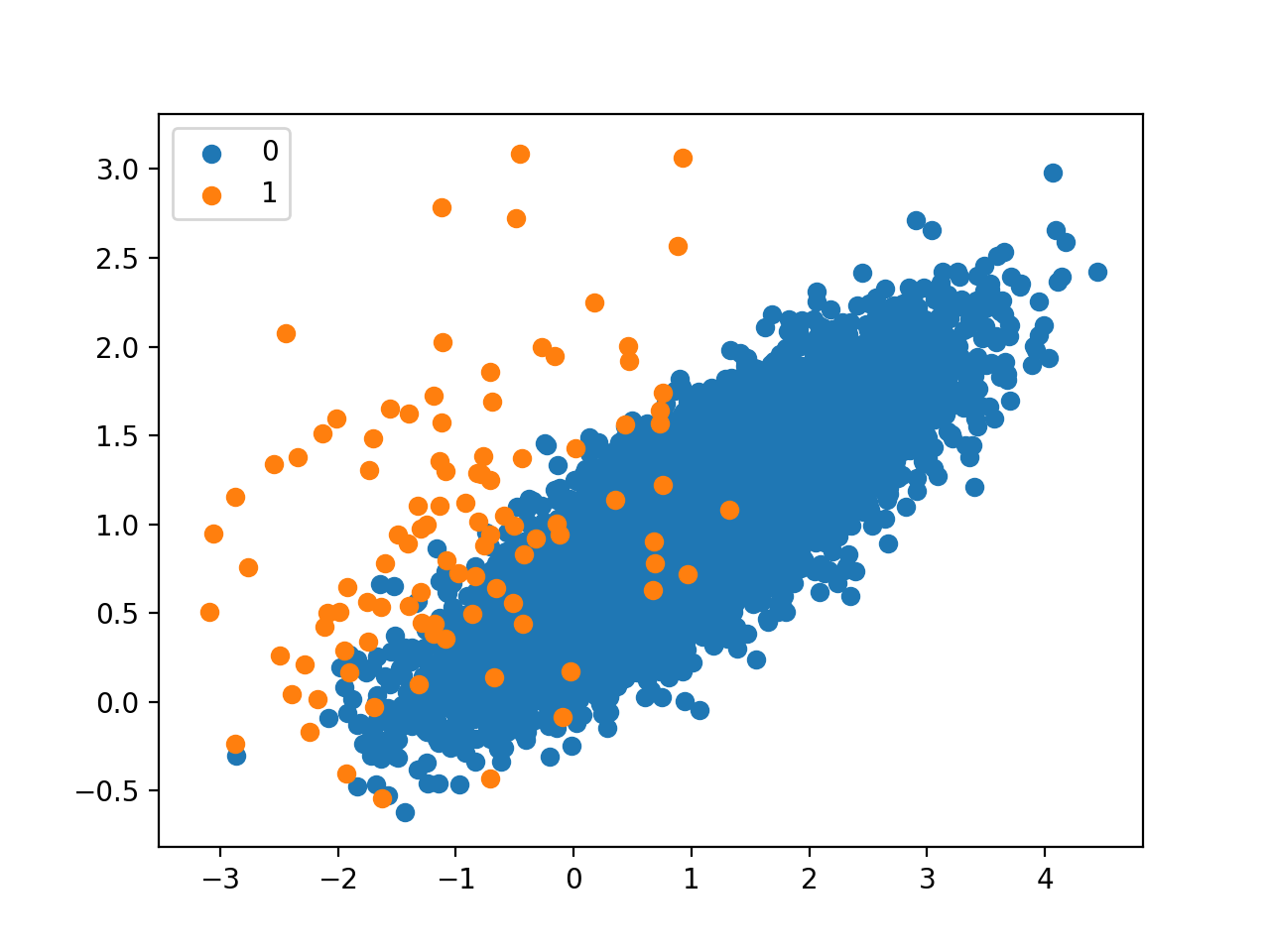
After ADASYN:
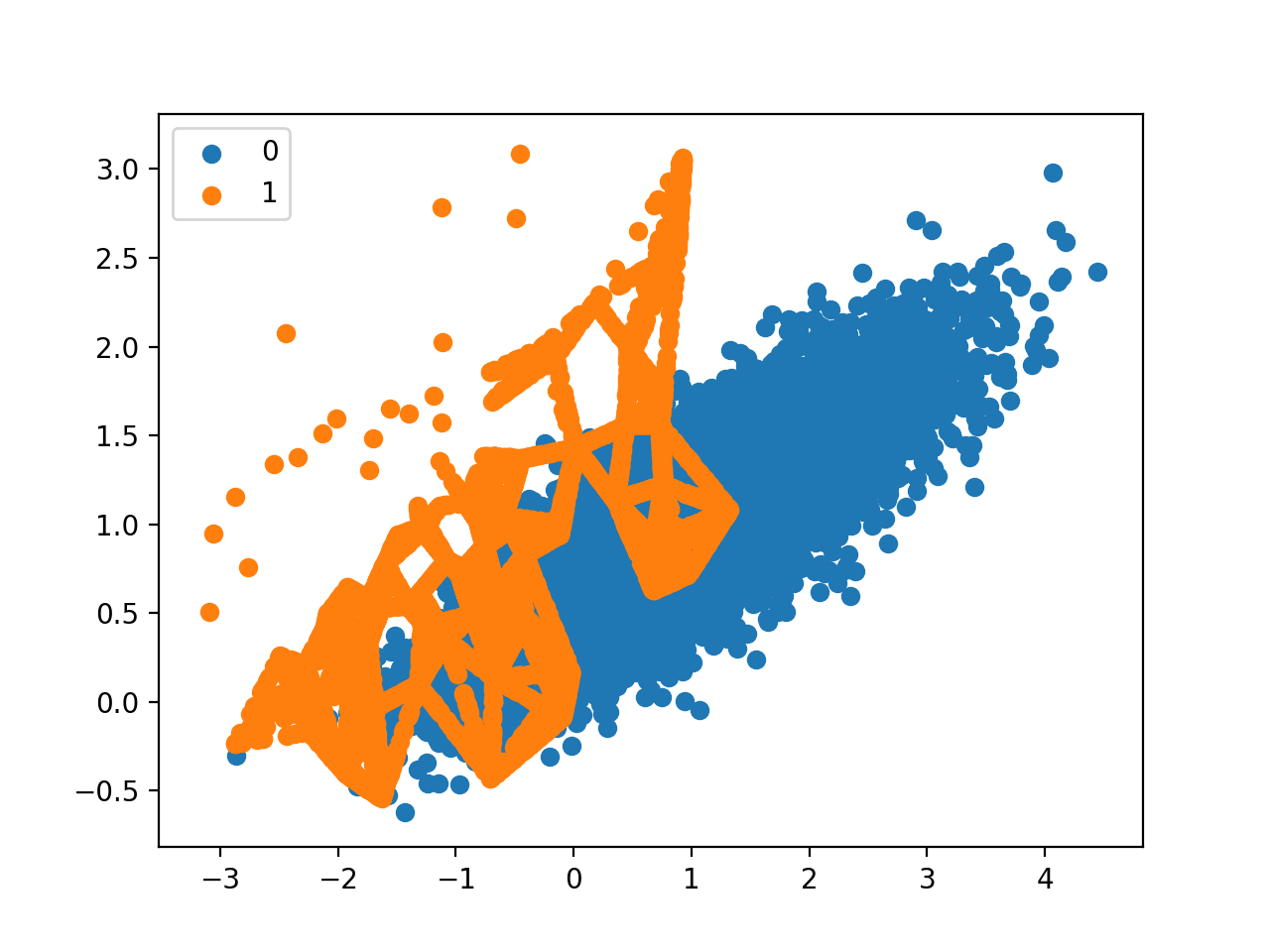
We theorized that we could use this method to increase samples in regions that our training data didn’t emphasize, and thus increase accuracy of non-ideal gestures for these worse-performing gestures. Since these non-ideal gestures would have very different accelerometer readings than the ideal gestures, they would correspond to these outliers that we are hoping to emphasize. Note that our training data already contained non-ideal gestures that have vastly different accelerometer data than ideal gestures, so this method should create more of these non-ideal examples and thus force the SVM to place more weight on these examples. With enough fine-tuning, we could find a balance where this process improved non-ideal gesture recognition without diminishing ideal gesture recognition accuracy. Specific methods of implementing ADASYN can be found in the code examples within the Project Repository and from reference (8).
Improved Experimental Results
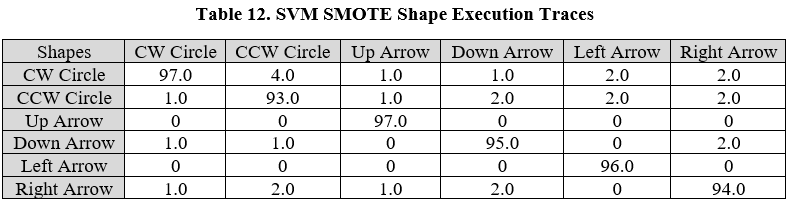
With the addition of SMOTE to the system, we can see that the accuracy of the system improves to a noticeable point. We chose to use ADASYN to add 20 examples each to Left Arrow and Up Arrow because they appeared to contain the most misclassifications. While SMOTE was only applied to the Up Arrow data and the Left Arrow data, we can see that the accuracy for other motions also improves possibly due to the addition of Gaussian Noise. Improving the sampling data of a single motion also decreases the amount of misclassifications that occur with different motions, ultimately limiting the choices and ensuring there are less mistakes. However subtle, these is an improvement in the amount of misclassified Up and Left Arrow motions and overall accuracy on those two themselves. Nevertheless due to this small margin and lack of samples, our results are not statistically significant and thus we cannot claim that this data augmentation technique did improve the SVM classifier. Rather, we are simply preseting this data augmentation technique and providing a deployable implementation of it. Its practicality and usefulness may heavily depend on the gesture recognition task.
Neural Network Comparison
As a final analysis, we compared the accuracy of the SVM classifier with the original training data and the augmented training data to that of a MLP classifier. This classifier is provided by Python’s sklearn package, and is defined as a multi-layer perceptron artificial neural network. We chose the solver to be lbfgs because this method is preferable for smaller datasets. For our analysis, we trained these classifiers with various training dataset sizes in order to determine which classifier performed best under limited training datasets. Note that we are conducting this analysis by splitting our training dataset into test and training data, thus all this classification does not occur on real-time accelerometer data.
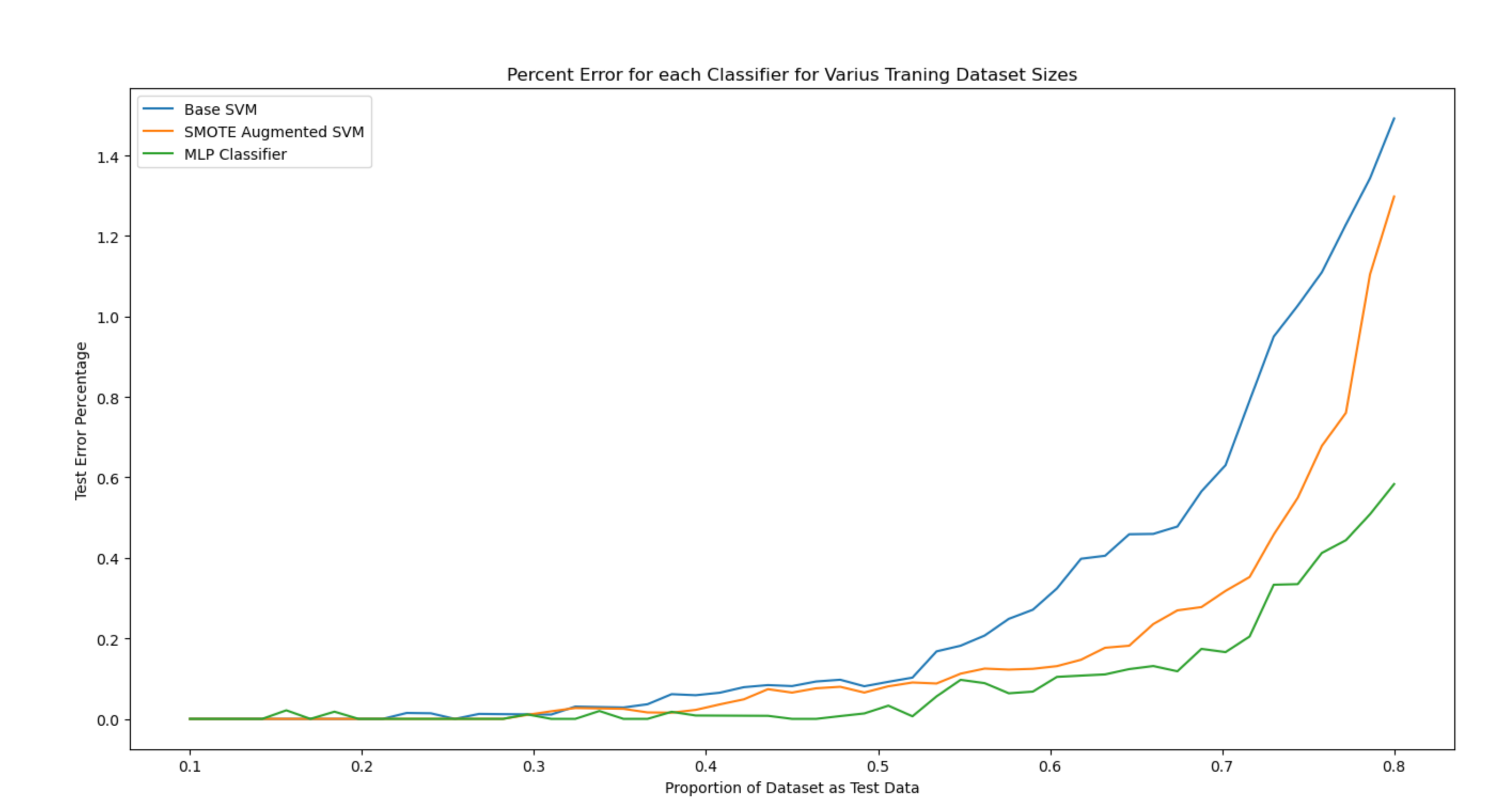
Based on the above plot, the MLP classifier performs better than the SVM classifier in every case, especially when a smaller amount of training data is used. Furthermore, we can see that the ADASYN and Gaussian noise augmentation of the training data provides improvements in accuracy when training data is limited.
Based on this, we can hypothesize that a MLP classifier would preform better for this gesture recognition task if there is limited training data. However, note that this classifier is significantly more computationally expensive than the SVM classifier. Based on this, the SVM classsifier may be preferable if there is sufficient training data and the gesture recognition task is simple. The marginally worse accuracy offered by SVM can be justified for certain applications by the significantly lower computational complexity and ease of deployability.
Conclusion
Our initial goal with this investigation was to determine the best possible classification technique for simple gesture recognition. We found two main classifiers, SVM and the DTW, that were both widely used and successful in their own way. What we found was that the SVM, while possibly harder to implement due to the necessity of a large training dataset, was much more accurate and could be used to overcome noise while the DTW was quick and simple, but highly inaccurate when it came to non-ideal motions.
In our research, we aimed to find the best technique for gaming situations where gesture recognition would be utilized by players to achieve goals. With this goal in mind, it became clear that the SVM is the better option to classify different gestures in these specific types of environments and offered significantly lower computational complexity. Furthermore, we hypothesized that this technique would be preferable for many other similar, simple gesture recognition techniques.
To further extend this classifier, we were introduced the SMOTE data augmentation technique which could help improve our classification and decided to apply that to our already successful SVM model. In the end, it was able to provide the accuracy that we needed to get our overall successful classifications in the 90% range or higher.
Timeline
Week 5 - Find relevant references, source code examples, and software packages in order to ensure an accurate and effective analysis.
Week 6/7 - Set up platforms for both recognition approaches, and ensure Arduino implementations adhere to methodology outlined in research papers. Difficulty comes down to utilizing the software and incorporating data collection techniques into the code so that we can determine accuracy of detection.
Week 8 - Collect training data and evaluate ideal case test data in order to validate claims on research paper. Prepare YouTube Presentation.
Week 9 - Evaluate all relevant gesture control parameters, and rigorously test non-ideal gestures. Incorporate SMOTE and Gaussian Noise in training data, and evaluate its effectiveness.
Week 10 - Finalize all evaluations, prepare final report and YouTube presentation.
References
(1) uWave: Accelerometer-based personalized gesture recognition and it applications
This research article presents uWave, a highly-efficient, low-complexity method of gesture recognition using Dynamic Time Warping. This research paper boasts an approach that requires small amounts of training data and a simple implementation, however, this approach relies on a simple and naive classifier. Dynamic Time Warping, and its transformation into a classifier in this research paper, would struggle to identify gestures that differ from the training data. Nevertheless, this approach may prove adequate in certain situations for the gestures tested, thus this method will serve as a baseline classifier in this analysis.
(2) Wikipedia: Dynamic Time Warping
This Wikipedia page provides a simple implementation of Dynamic Time Warping in MATLAB, which we were easily able to convert to C and then implement on the Arduino.
(3) Arduino TensorFlow Lite Tutorial
This GitHub repository provided us with source code we used to collect training data, and skeleton code that we used classify gestures in real-time. Although we didn’t use TinyML or TensorFlow Lite, this repository provided many resources for getting started with gesture recognition on an Arduino.
(4) Gesthaar: An accelerometer-based gesture recognition method and its application in NUI driven pervasive healthcare
This research paper presents Gesthaar as a robust gesture recognition classifier utilizing Haar Transforms and Gaussian Kernel Support Vector Machine Classifier. This paper presents this
approach as an alternative to the Dynamic Time Warping Classification method presented in (1). Based on the research paper, this classifier should be significantly more user and time independent
compared to Dynamic Time Warping classification techniques. This will help us not only filter out noise, which is ideal, but also ensure there is minimal margin of error amongst users. As there are two of us, this testing can be performed. This method is more computationally complex than the approach in (1), however the Nano BLE Sense should be able to easily handle this algorithm. We will compare this classifier to (1) through various relevant requirements of gesture control.
(5) Even Smaller Machine Learning Models for your MCU
This GitHub webpage walks through the process of training a Gaussian Kernel SVM classifier in Python and porting that model to C. Thus, this clasifier could be run on any microcontroller with enough capabilities. We used the package presented in this website (micromlgen) to import the Gaussian Kernel SVM to the Nano Sense BLE, and then test the effectiveness of the strategy suggested in (4).
(6) Haar Transform Library for C
This code repository provided by Florida State University offers the Haar and Inverse Haar Transform implemented in C. Thus, this code can be easily ported to the Nano BLE sense in order to replicate the approach used in (4).
(7) Discrete Haar Wavelet Transform
This article offered further explanation of the Haar Wavelet transform, and examples that assisted us in implementing it on the Arduino.
(8) SMOTE Package
This is the repository that contains the SMOTE imbalanced learn package that we used to improve our training data.
(9) SMOTE for Imbalanced Classification in Python
This website offered various extenstions of the SMOTE library, which introduced ADASYN as a method of balancing training data using the inverse of the density of the minority class.
(10) Sklearn MLP Classifier
This is the definition of the MLP artificial neural network classifier we used for comparison. As shown on the website, the implementation of this classifier only relies on the selection of hyper-parameters.